
すべての製品
-
 ジョーあなたの機械は非常によい、サービスおよび売り上げ後のサービスは非常によい、私のチームおよび私は非常に満足し、私は次の時間私が買う見つける
ジョーあなたの機械は非常によい、サービスおよび売り上げ後のサービスは非常によい、私のチームおよび私は非常に満足し、私は次の時間私が買う見つける
コンタクトパーソン :
Xue Wang
電話番号 :
+86 18676976272
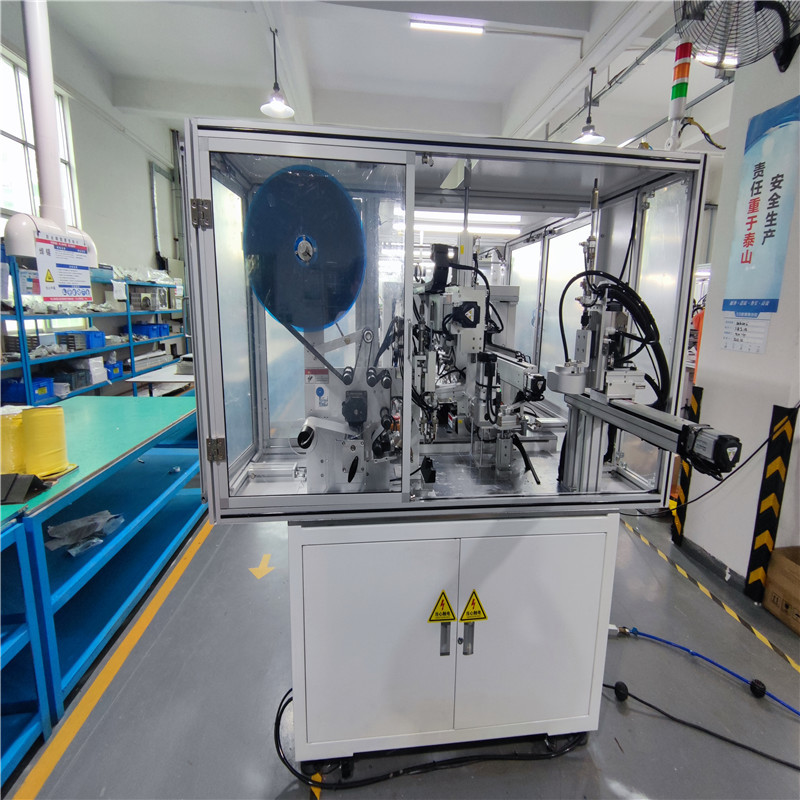
機械に超音波PLC制御をするフル オートマチックN95コップのマスク







| 起源の場所 | 広東省、中国 |
|---|---|
| ブランド名 | chuangying |
| 証明 | CE |
| モデル番号 | コップのマスク |
| 最小注文数量 | 150組のセット/セット每の 月 |
| 価格 | $25,000.00/Sets 1-4 Sets |
| パッケージの詳細 | 真空パッキングの後で木箱を詰めなさい |
| 供給の能力 | 150組のセット/セット每の 月 |
商品の詳細
| 適当な企業 | 機械類の修理工場、製造工場、他 | ショールームの位置 | 韓国 |
|---|---|---|---|
| 条件 | 新しい | 自動等級 | フル オートマチック |
| 電圧 | 220V、380V | 力 | 14 W |
| 次元(L*W*H) | 7699mm*2613mm*1726mm | 重量 | 2400のKG |
| 保証 | 1年 | 生産能力 | 他 |
| 主セリング・ポイント | 有名なブランドPLC | マスクのタイプ | コップ |
| マスク材料 | Non-woven生地 | 製品名 | コップのマスク機械 |
| キーワード | 機械を作る超音波マスク | ||
| ハイライト | 機械を作るN95コップのマスク,フル オートマチックN95コップのマスク機械,機械を作る超音波コップのマスク |
||
製品の説明
点の機械に自動コップのマスクの印刷物機械n95をする出荷のコップのマスク機械フル オートマチックのコップのマスク
コップのマスクに平らなマスク上の次の利点がある:
1. マスクと表面間の独特なコップの形の設計、よりよいシーリング、塵およびウイルスは容易に漏ることができない;
2. 人間工学的の鼻の設計は身に着けていることの慰めを高めることができる。
3. コップのマスクはよりよい慰めのための頭部で一般に身に着けられている
4.Wearプロセスは変形、よい保護性能に容易ではない。
|
モデルいいえ。
|
DEYI
|
サーボ モーター
|
THINGET (フランス)
|
|
製品名
|
コップのマスク
|
制御システム
|
DEYI
|
|
マスク サイズ
|
140mm×120mm×50mm
|
超音波発電機
|
220V、20kHz、1.5kW
|
|
速度
|
12-15 PC/分
|
センサー
|
松下電器産業(日本)
|
|
材料
|
Non-woven生地、溶解吹かれた生地、熱気の綿、
カーボン繊維の生地、Mircoフィルター生地、等。 |
空気部品
|
SMC (日本) AIRTAC (台湾
|
|
層
|
3-6
|
ベルト
|
(日本)
|
|
熱い押されたCupType
|
コップのタイプはカスタマイズすることができる
|
主要な基盤
|
DEYI
|
|
耳の革紐の固定タイプ
|
綴じることによって(ステープルのサイズ:6-7mm L;1mm W)、
または超音波溶接によって |
ケーブル
|
IGUS (ドイツ) ECHU (中国)
|
|
コントロール パネル
|
コントロール パネル10インチのタッチ画面の
|
ケーブル搬送システム
|
THINGET (中国)
|
|
空気圧
|
0.6MPa
|
線形ガイド
|
銀(台湾)
|
|
力
|
14.5kW
|
足車
|
地球(中国)
|
|
電源
|
380V/50Hz
|
球ねじ
|
HIWIN (台湾)
|
|
機械区域
|
13m x 2.55m x 1.8m (H) L X W X
|
安全装置
|
病人(ドイツ)
|
形成の溶接の切断
![]()
![]()
![]()
Q:どの位受渡し時間はあるか。
答え:一般的な状態は配達のための3-5日である。カスタマイズされたマスクの形を必要とすれば、7-10日かかる。細部についてはカスタマー サービスを参照しなさい。
質問:私によってがほしい機械はインターネットで示されている何と余りに矛盾している。私はそれをしてもいいか。
答え:はい、機械映像および終了するマスク映像を提供する必要がある。
質問:私は何を機械を買い、それを取付けなければするべきであるか。
答え:韓国におよびベトナムにアフターセールスがあり、場所に取付けることができる。他の国は設置ビデオおよび遠隔ビデオ指導を送ることができる。多くの外国顧客はこうすればを取付ける。ただ撮影機械のコネクターの4個のねじを取付ける必要があり、earband機械は、布に荷を積み、正常に作動することを学ぶ。会社は全教授のテキスト バージョンそしてビデオ版が装備される。
Q:どの位保証期間はあるか。
答え:保証期間は1年である。超音波は3か月である。保証期間の間に、部品は損なわれ、会社は新しい部品を提供する。
次の情報は参照だけのためのインターネットから来る
コップのマスク機械
マスクを作り出すのにマスク機械を使用するプロセスは何であるか。
平らなマスクの工程:
与え、研ぐNon-wovenステップ ベルト—高温圧縮—折りたたみの形成—超音波earbandの溶接—鼻橋溶接—不用な取り外し—完成品の出力—殺菌—分析
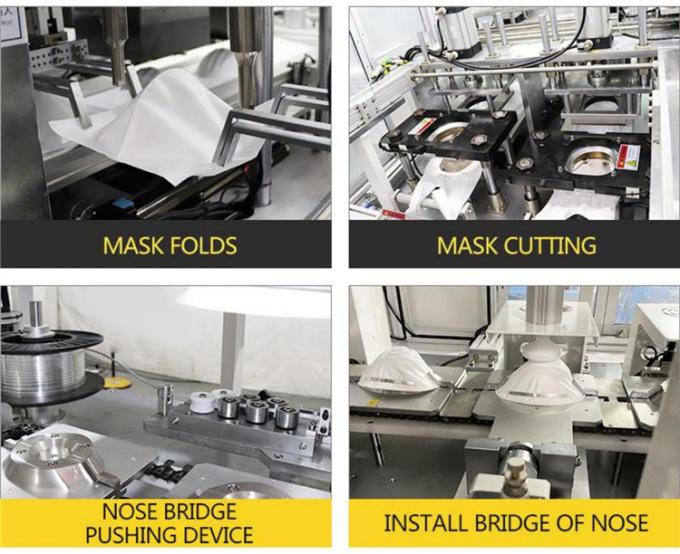
N95コップのマスクの工程(呼吸弁と):
与え、研ぐこと—高温圧縮—製造の外のマスク—溶接し、調整—マスクの印刷—呼吸弁のパーホレーション—鼻橋ストリップの溶接—内部の鼻橋を貼る—溶接の耳バンド—溶接の呼吸弁—cup-shaped完成品の出力—細菌を消しなさい—分析
マスク機械はマスクを作り出すことができる
コップのマスク機械でどんな技術および仕事知識が使用されるか。
1. 加工技術:詳しいプロセス フローがなければ、行為流れのすなわち、大ぞろいならない
例えば、供給の後で端を包む方法を与え始める方法をそして次に形づく方法を…
このプロセスは下記によって提供される:[プロセス エンジニア]
2. 機械技術:完全な行為プロセスを使うと、[機械工学者]機械構造を、有用で物質的な皿のメカニズム、ガイドのメカニズム、ローラーのメカニズム、拍車ギヤ、軸受け、スプロケットおよびローラーのメカニズム、フリップ メカニズム、カム割れ目のメカニズム、ワイヤー デッサンの溶接は行為に相当してメカニズム、メカニズム、等を運ぶせん断のメカニズムのような設計できる。
この部分は下記によって設計され、完了する:[機械工学者]
3. 電気技術:機械構造は確立された後それを動かすことを、電気アクチュエーターによって運転し、運転される必要がある。
例えば、コンベヤー ベルトはモーターおよび頻度コンバーターによって運転され、切断位置は空気シリンダーまたはサーボかステップによって運転される。
電気制御プログラミング部品はPLCのタッチ画面のプログラム制御を使用し、また頻度コンバーター、モーター、ステップ システム、サーボ・システム、電磁弁、シリンダー、センサー、温度のアナログおよび他の技術を使用する
この部分は下記によって設計され、完了する:[電気技師]